Monocular depth estimation is a pc imaginative and prescient job the place an AI mannequin tries to foretell the depth data of a scene from a single picture. On this course of, the mannequin estimates the gap of objects in a scene from one digital camera viewpoint. Monocular depth estimation has many functions and has been extensively utilized in autonomous driving, robotics, and extra. Depth estimation is taken into account one of many hardest laptop imaginative and prescient duties, because it requires the mannequin to know advanced relationships between objects and their depth data. This implies many components come into play when estimating the depth of a scene. Lighting situations, occlusion, and texture can tremendously have an effect on the outcomes.
We’ll discover monocular depth estimation to know the way it works, the place it’s used, and find out how to implement it with Python tutorials. So, let’s get began.
About us: Viso Suite is end-to-end laptop imaginative and prescient infrastructure for enterprises. Housed in a single platform, groups can handle a spread of duties from folks counting to object detection and motion estimation. To see how Viso Suite can profit your group, e-book a demo with our crew of consultants.
Understanding Monocular Depth Estimation
Depth estimation is an important step in the direction of understanding scene geometry from 2D photos. The aim of monocular depth estimation is to foretell the depth worth of every pixel. That is known as inferring depth data, utilizing just one RGB enter picture. Depth estimation strategies analyze visible particulars similar to perspective, shading, and texture to estimate the relative distances of objects in an Picture. The output of a depth estimation mannequin is usually a depth map.

To coach AI fashions on depth-maps we are going to first need to generate depth-maps. Depth estimation is a job that helps machines see the world in 3D, similar to we do. This provides us an correct sense of distances and enhances our interactions with our environment. We use a number of widespread applied sciences to generate depth maps with cameras. For instance, Time-of-Flight and Mild Detection and Ranging (LiDAR), are well-liked depth-sensing applied sciences engineers use in fields like robotics, industrial automation, and autonomous autos. Subsequent, let’s clarify these vital laptop imaginative and prescient (CV) applied sciences.
How Does Depth Estimation Work?
Inside the world of depth sensing applied sciences there isn’t any single answer to each utility, in some circumstances, engineers could even use a mixture of strategies to attain the specified outcomes. A robotic or an autonomous car can use cameras and sensors with embedded software program to sense depth data using well-liked strategies. These strategies normally include a sign that may be something from mild or sound to particles. Then some algorithms are utilized to calculate the Time-of-flight and extract data from that.
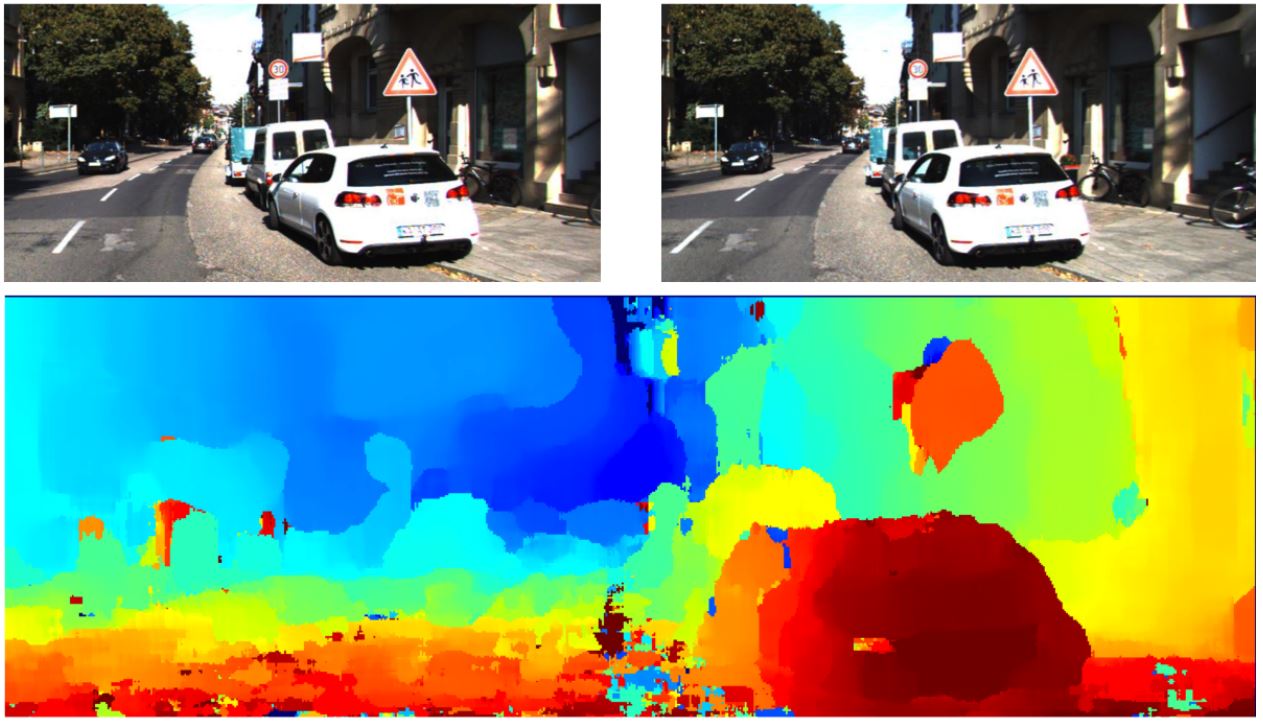
An excellent instance is stereo depth estimation, not like monocular depth estimation it really works by utilizing 2 cameras with sensors taking photos in parallel. That is like human binocular imaginative and prescient as a result of engineers set two cameras a number of centimeters aside. The embedded software program detects the matching options within the photos. Since every picture may have a special offset of the detected options, the software program makes use of the offset to calculate the depth of the purpose by a way known as triangulation.
Most stereo-depth cameras use energetic sensing and a patterned mild projector, that casts a sample on surfaces, that helps establish flat or textureless objects. These cameras usually use near-infrared (NIR) sensors, enabling them to detect each the projected infrared sample and visual mild. Different strategies like LiDAR use mild within the type of a laser that activates and off quickly to measure distances from which software program can calculate depth measurements. That is usually utilized in creating 3D maps of locations, it may be used to discover caves, historic websites, and any earth floor. Then again, monocular depth estimation depends on utilizing one picture to foretell the depth map, utilizing AI strategies for correct predictions. Let’s have a look at the completely different AI strategies utilized in monocular depth estimation.
AI Methods In Monocular Depth Estimation
Whereas stereo depth estimation strategies are helpful for some situations, developments in synthetic intelligence have opened the door for brand spanking new use circumstances of depth estimation, similar to monocular depth estimation. With the facility of machine studying engineers can prepare and infer machine studying fashions to foretell depth maps from a single picture. This in flip led to developments in fields like autonomous driving, and augmented actuality. The primary benefit is that specialised tools is just not wanted to sense the depth of knowledge. On this part, we are going to discover the AI strategies used for monocular depth estimation.
Supervised Studying for Monocular Depth Estimation
Synthetic neural networks (ANNs) since their invention have been instrumental in fixing issues like monocular depth estimation. There are a number of methods a neural community could be educated, and a type of is supervised studying. In supervised studying, the mannequin is educated on information with labels, the place a neural community can study relationships between the photographs and their depth maps, and make predictions based mostly on the realized relationships. Researchers extensively use convolutional neural networks (CNNs). CNNs can study an implicit relation between colour pixels and depth. Mixed with post-processing and deep-learning approaches CNNs are actually probably the most extensively used spine for depth estimation fashions.
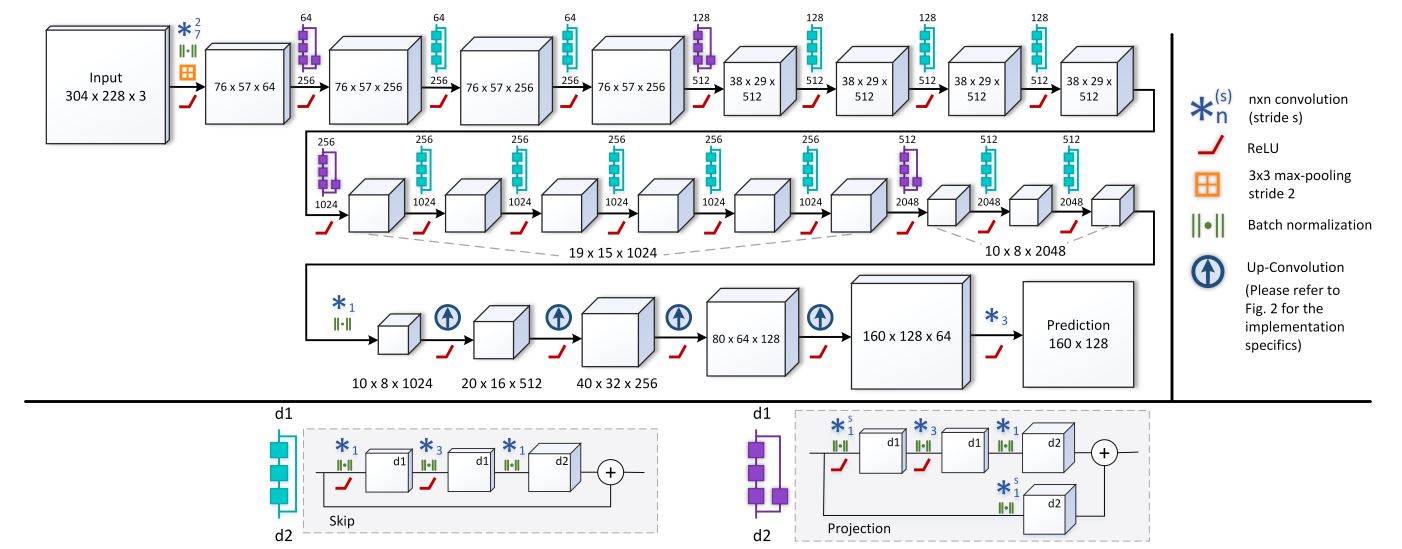
Since constructing and coaching these CNNs is a tough job, researchers normally use a pre-trained mannequin and apply the vital idea of switch studying. Switch studying is utilized to a mannequin that has been educated on a common dataset to make it work for a extra particular use case. Some well-liked U-net-based architectures that researchers use as backbones for fine-tuned monocular depth estimation fashions are the next.
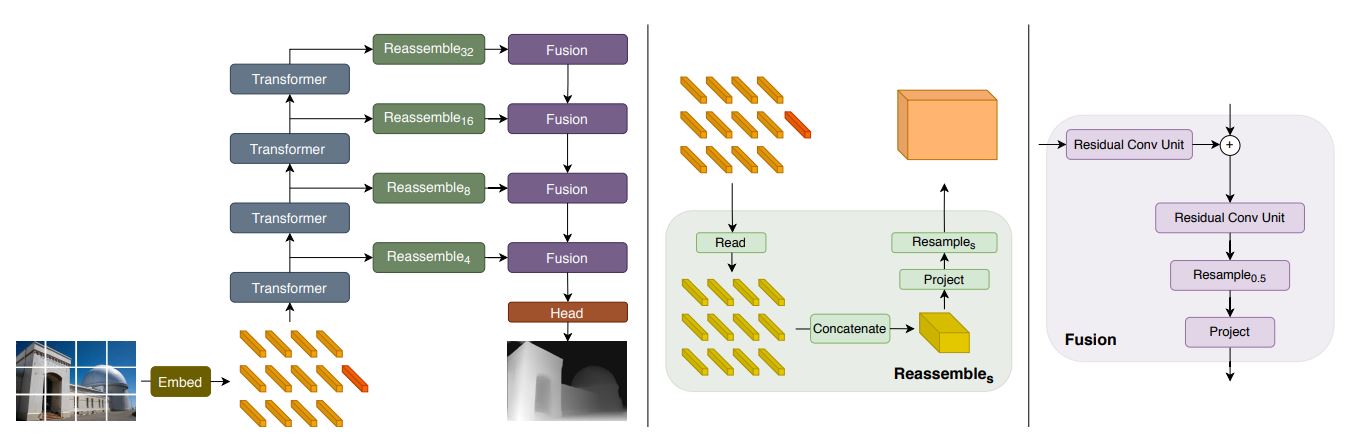
Nevertheless, extra trendy structure could be Imaginative and prescient Transformers (ViT), these transformative fashions have been launched as alternate options to CNNs in laptop imaginative and prescient functions. ViTs use a self-attention block within the structure permitting it to have the next capability and lead to superior efficiency. These fashions principally depend on an encoder-decoder structure that may be made into completely different variations for various use circumstances. In comparison with CNN-based architectures, ViT-based ones have greater than a 28% efficiency enhance in depth estimation.
Whereas these strategies work nice with supervised studying, they rely closely on giant labeled datasets that are costly, time-consuming, and may have biases. Subsequent, let’s discover different coaching strategies.
Unsupervised and Self-Supervised Studying for Monocular Depth Estimation
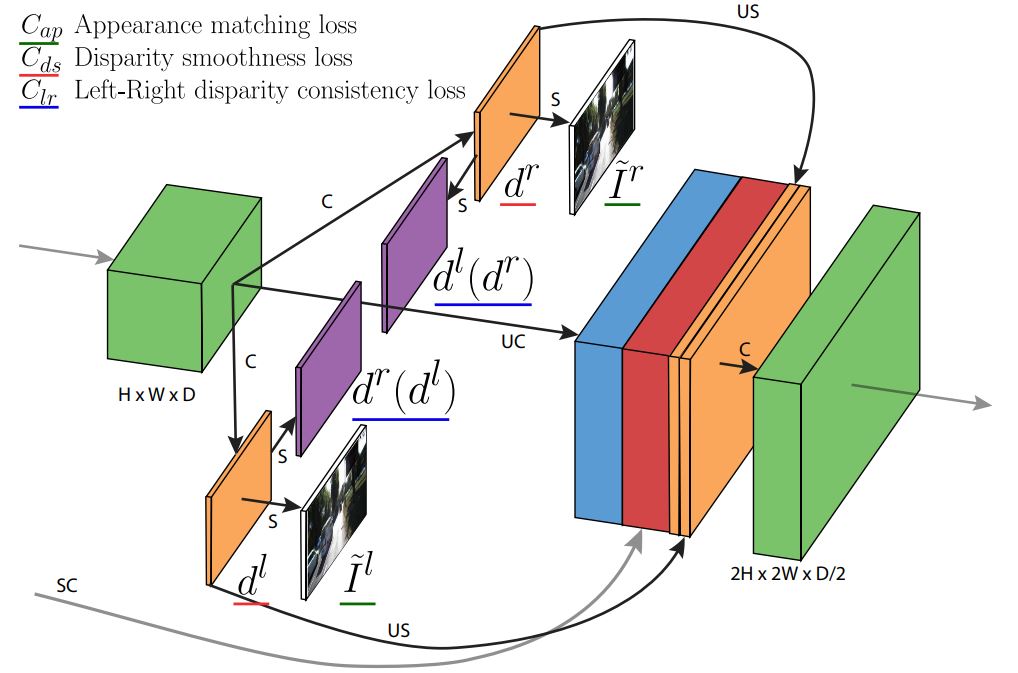
Most monocular depth estimation approaches deal with depth prediction as a supervised regression downside and because of this, require huge portions of ground-truth depth information for coaching. Nevertheless, different unsupervised and self-supervised approaches obtain nice ends in depth prediction with easier-to-obtain binocular stereo footage. Researchers can leverage stereo-image pairs through the mannequin’s coaching to permit neural networks to study implicit relations between the pairs.
The core thought is to coach the community to reconstruct one picture of the stereo pair from the opposite. By studying to do that, the community implicitly learns concerning the depth of the scene. Mixed with different approaches like left-right consistency unsupervised approaches can lead to state-of-the-art efficiency. Left-right consistency permits the community to foretell disparity maps for each the left and proper photos, and the coaching loss encourages these disparity maps to be in keeping with one another.
Self-supervised studying is one other method researchers have taken for depth estimation. One of many well-liked research makes use of a video sequence to coach the neural community. The neural community learns the distinction between body A and body B utilizing pose estimation. The community tries to reconstruct body B from body A, evaluate the reconstruction, and decrease the error. Moreover, the researchers of this examine used a number of strategies to enhance the efficiency.
These strategies embrace auto-masking the place objects which are stationary in each body are masked to not confuse the mannequin, and full-resolution multi-scale to enhance high quality and accuracy. That being mentioned, depth-estimation approaches are continuously evolving, and researchers are discovering new methods to make correct depth maps from single photos. So, subsequent, let’s get right into a step-by-step tutorial to construct a depth-estimation mannequin.
Step-by-Step Tutorial: Utilizing a Depth Estimation Mannequin
Now that we have now explored the theoretical ideas of monocular depth estimation, let’s roll up our sleeves for a sensible implementation with Python. On this tutorial, we are going to undergo the method of constructing and utilizing a depth estimation mannequin. We can be using the Keras framework with Tensorflow, and constructing upon the offered instance by Keras. Nevertheless, some prior data of Python and machine studying ideas can be useful for this part. On this instance, we’ll adapt and enhance upon the code from the Keras tutorial on monocular depth estimation and we’ll construction it as follows.
- Setup and Knowledge Preparation
- Constructing the Knowledge Pipeline
- Constructing the Mannequin and Defining the Loss
- Mannequin Coaching and Inference
So, let’s begin with the setup and information preparation for this tutorial.
Setup and Knowledge Preparation
For this tutorial, we are going to use Kaggle as the environment and the Dense Indoor and Out of doors Depth (DIODE) Dataset to coach our mannequin. So, let’s begin by getting ready the environment and importing the wanted libraries. I created a brand new Kaggle pocket book and enabled GPU acceleration.
import os os.environ["KERAS_BACKEND"] = "tensorflow" import sys import tensorflow as tf import keras from keras import layers from keras import ops import pandas as pd import numpy as np import cv2 import matplotlib.pyplot as plt keras.utils.set_random_seed(123)
These imports give us all of the libraries we’d like for the monocular depth estimation mannequin. We’re utilizing the OS, SYS, OpenCV (CV2) Tensorflow, Keras, Numpy, Pandas, and Matplot. Keras and TensorFlow are going to be the backend, OS and SYS will assist us with information loading, CV2 will assist us course of the photographs, and Numpy and Pandas to facilitate between the loading and processing.
Subsequent, let’s obtain the info, as talked about beforehand we are going to use the DIODE dataset, nonetheless, we are going to solely use the validation dataset as a result of the complete dataset is over 80GB which is just too giant for our objective. The validation information is 2.6GBs which is simpler to deal with and higher for our objective so we are going to use that.
annotation_folder = "/kaggle/working/dataset/"
if not os.path.exists(os.path.abspath(".") + annotation_folder):
annotation_zip = keras.utils.get_file(
"val.tar.gz",
cache_subdir=os.path.abspath(annotation_folder), # Extract to /kaggle/working/dataset/
origin="http://diode-dataset.s3.amazonaws.com/val.tar.gz",
extract=True,
)
This code downloads the validation set of the DIODE dataset to the Kaggle/working folder, and it’ll extract it in a folder known as dataset in there. So, now we have now the dataset put in in our Kaggle workspace. Subsequent, let’s put together this information and course of it to turn out to be appropriate to be used in coaching our mannequin.
df_list = [] # To Retailer Each Indoor and Out of doors
for scene_type in ["indoors", "outdoor"]:
path = os.path.be part of("/kaggle/working/dataset/val", scene_type)
filelist = []
for root, dirs, information in os.stroll(path):
for file in information:
filelist.append(os.path.be part of(root, file))
filelist.kind()
information = {
"picture": [x for x in filelist if x.endswith(".png")],
"depth": [x for x in filelist if x.endswith("_depth.npy")],
"masks": [x for x in filelist if x.endswith("_depth_mask.npy")],
}
df = pd.DataFrame(information)
df = df.pattern(frac=1, random_state=42)
df_list.append(df) # Append the dataframe to the listing
# Concatenate the dataframes
df = pd.concat(df_list, ignore_index=True)
#Examine if Paths are appropriate
print(df.iloc[0]['image'])
print(df.iloc[0]['depth'])
print(df.iloc[0]['mask'])
Don’t be intimidated by the code, what this principally does is it goes by the information we downloaded, and appends the file names right into a Pandas information body. Since we can be utilizing each indoor and outside photos from the dataset we use 3 For loops, that first undergo the indoors folder, we put the “.png” picture information in a column, the depth values in a column, and the masks in one other.
Constructing The Knowledge Pipeline
For monocular depth estimation, we use the depth values and the masks to generate a depth map that we are going to use to coach the mannequin alongside the unique photos. We’ll construct a pipeline perform that primarily does the next.
- Learn a Pandas information body with paths for the RGB picture, the depth, and the depth masks information.
- Load and resize the RGB photos.
- Reads the depth and depth masks information, processes them to generate the depth map picture, and resizes it.
- Return the RGB photos and the depth map photos for every batch.
Sometimes in machine studying, information pipelines are constructed as lessons, this makes it simpler to make use of the pipeline as many instances as wanted. On this tutorial, we are going to construct it as a perform that makes use of some well-liked information processing strategies that can assist us prepare our mannequin effectively.
def load_and_preprocess_data(df_row, img_size=(256, 256)):
"""
Hundreds and preprocesses picture and depth map from a DataFrame row
"""
img_path = df_row['image']
depth_path = df_row['depth']
mask_path = df_row['mask']
img = cv2.imread(img_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = cv2.resize(img, img_size)
img = tf.picture.convert_image_dtype(img, tf.float32) # Use tf.picture.convert_image_dtype
depth_map = np.load(depth_path).squeeze()
masks = np.load(mask_path)
masks = masks > 0
max_depth = min(300, np.percentile(depth_map, 99))
depth_map = np.clip(depth_map, 0.1, max_depth)
depth_map = np.log(depth_map, the place=masks)
print("Min/Max depth earlier than preprocessing:", np.min(depth_map), np.max(depth_map))
depth_map = np.ma.masked_where(~masks, depth_map)
depth_map = np.clip(depth_map, 0.1, np.log(max_depth))# Clip after masking
depth_map = cv2.resize(depth_map, img_size)
depth_map = np.expand_dims(depth_map, axis=-1)
depth_map = tf.picture.convert_image_dtype(depth_map, tf.float32)
print("Min/Max depth after preprocessing:", np.min(depth_map), np.max(depth_map))# Use tf.picture.convert_image_dtype
return img, depth_map
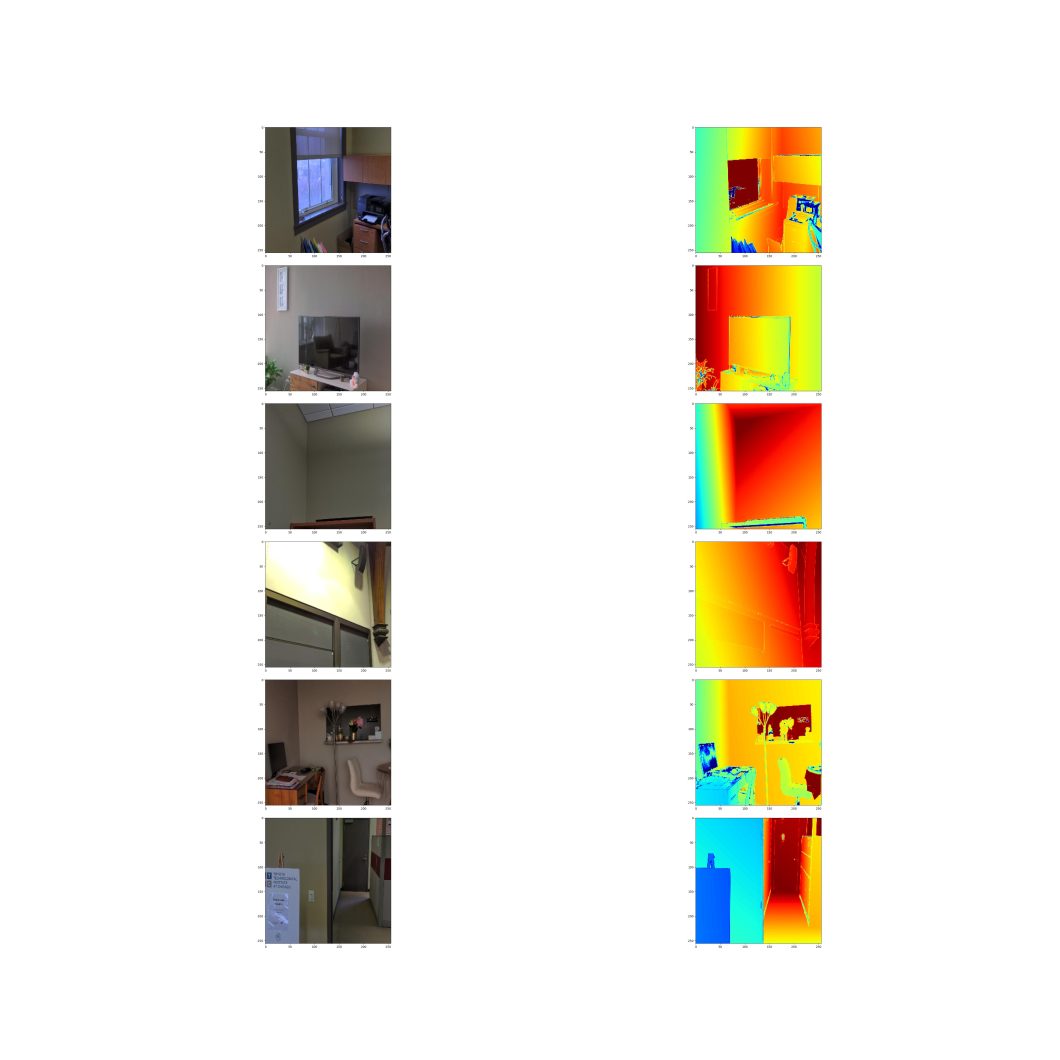
Now let’s visualize a few of our information.
import matplotlib.pyplot as plt
def visualize_data(picture, depth_map, masks):
"""
Visualizes the picture and its corresponding depth map with masks utilized.
"""
# Apply masks to depth map
masked_depth = depth_map * masks
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
axes[0].imshow(picture)
axes[0].set_title('Picture')
# Use plt.cm.jet colormap
axes[1].imshow(depth_map, cmap=plt.cm.jet)
axes[1].set_title('Uncooked Depth Map')
# Use plt.cm.jet colormap
axes[2].imshow(masked_depth, cmap=plt.cm.jet)
axes[2].set_title('Masked Depth Map')
plt.savefig("visualization_example.jpg")
plt.present()
# Instance utilization
for i in vary(3):
img, depth_map = load_and_preprocess_data(df.iloc[i])
# Load the masks
mask_path = df.iloc[i]['mask']
masks = np.load(mask_path)
masks = cv2.resize(masks, (img.form[1], img.form[0])) # Resize masks to match picture
masks = np.expand_dims(masks, axis=-1) # Add channel dimension
visualize_data(img, depth_map, masks)
Constructing the Mannequin and Defining the Loss
Now we have now reached what could be the trickiest a part of this tutorial, however it’s fascinating so sustain. For this tutorial, we are going to use an structure for the mannequin as follows.
- ResNet50 Encoder as a Spine
- 5 Decoder Layers
- An Output layer
A attainable enchancment could be so as to add a bottleneck layer and optimize the decoder/encoder layers. This structure is straightforward and permits us to attain respectable outcomes. Let’s get to the code.
def create_depth_estimation_model(input_shape=(256, 256, 3)):
"""
Creates a depth estimation mannequin with ResNet50 encoder and U-Internet decoder.
"""
# Encoder
inputs = Enter(form=input_shape)
base_model = ResNet50(weights="imagenet", include_top=False, input_tensor=inputs)
# Get characteristic maps from encoder
skip_connections = [
base_model.get_layer("conv1_relu").output, # (None, 128, 128, 64)
base_model.get_layer("conv2_block3_out").output, # (None, 64, 64, 256)
base_model.get_layer("conv3_block4_out").output, # (None, 32, 32, 512)
base_model.get_layer("conv4_block6_out").output, # (None, 16, 16, 1024)
]
# Decoder
up1 = UpSampling2D(dimension=(2, 2))(base_model.output) # (None, 32, 32, 2048)
concat1 = concatenate([up1, skip_connections[3]], axis=-1) # (None, 32, 32, 3072)
conv1 = Conv2D(1024, 3, activation='relu', padding='similar')(concat1)
conv1 = Conv2D(1024, 3, activation='relu', padding='similar')(conv1)
up2 = UpSampling2D(dimension=(2, 2))(conv1) # (None, 64, 64, 1024)
concat2 = concatenate([up2, skip_connections[2]], axis=-1) # (None, 64, 64, 1536)
conv2 = Conv2D(512, 3, activation='relu', padding='similar')(concat2)
conv2 = Conv2D(512, 3, activation='relu', padding='similar')(conv2)
up3 = UpSampling2D(dimension=(2, 2))(conv2) # (None, 128, 128, 512)
concat3 = concatenate([up3, skip_connections[1]], axis=-1) # (None, 128, 128, 768)
conv3 = Conv2D(256, 3, activation='relu', padding='similar')(concat3)
conv3 = Conv2D(256, 3, activation='relu', padding='similar')(conv3)
up4 = UpSampling2D(dimension=(2, 2))(conv3) # (None, 256, 256, 256)
concat4 = concatenate([up4, skip_connections[0]], axis=-1) # (None, 256, 256, 320)
conv4 = Conv2D(128, 3, activation='relu', padding='similar')(concat4)
conv4 = Conv2D(128, 3, activation='relu', padding='similar')(conv4)
up5 = UpSampling2D(dimension=(2, 2))(conv4) # (None, 512, 512, 128)
conv5 = Conv2D(64, 3, activation='relu', padding='similar')(up5)
conv5 = Conv2D(64, 3, activation='relu', padding='similar')(conv5)
# Output layer
output = Conv2D(1, 1, activation='linear')(conv5) # or 'sigmoid'
mannequin = Mannequin(inputs=inputs, outputs=output)
return mannequin
Using Keras and Tensorflow, we have now constructed the structure that we encompassed inside a perform. The picture dimension used right here is 256×256 so that may be elevated if wanted however it will enhance the coaching time. Subsequent, we must always outline a loss perform that can optimize the mannequin because it’s coaching, for the loss perform we will go as advanced or so simple as wanted. On this tutorial, we are going to use a average method. A easy imply squared error loss perform mixed with Huber loss.
from tensorflow.keras import backend as Okay
def custom_loss(y_true, y_pred):
mse_loss = Okay.imply(Okay.sq.(y_true - y_pred))
huber_loss = tf.keras.losses.huber(y_true, y_pred)
# Mix the losses
total_loss = mse_loss + 0.1 * huber_loss
return total_loss
Every of these losses has a weight, which we outlined to be 0.1 right here. Lastly, we have to break up the info and run it by our information perform to feed it to the mannequin subsequent.
photos = []
depth_maps = []
for index, row in df.iterrows():
img, depth_map = load_and_preprocess_data(row)
photos.append(img)
depth_maps.append(depth_map)
photos = np.array(photos)
depth_maps = np.array(depth_maps)
X_train, X_val, y_train, y_val = train_test_split(
photos, depth_maps, test_size=0.2, random_state=42
)
Mannequin Coaching and Inferencing
To coach the mannequin we constructed, we must compile it and match it to the info we have now.
with tf.gadget('/GPU:0'): # Use the primary out there GPU
mannequin = create_depth_estimation_model()
mannequin.compile(optimizer="adam", loss=custom_loss, metrics=['mae'])
historical past = mannequin.match(
X_train,
y_train,
epochs=60,
batch_size=32,
validation_data=(X_val, y_val),
shuffle=True
)
So, right here we compile the mannequin and create it on the GPU, after which we match it. I didn’t implement many hyperparameters on this case, I used the variety of epochs to coach the mannequin, and I enabled the shuffle to attempt to stop overfitting. The batch dimension is 32 which is an efficient worth for our Kaggle surroundings. There could possibly be extra hyperparameters in there, like the educational charge. This coaching would take round 10-Quarter-hour. Subsequent, we will outline a small perform to organize an enter picture to check the educated mannequin.
def load_and_preprocess_image(image_path, img_size=(256, 256)):
"""Hundreds and preprocesses a single picture."""
img = cv2.imread(image_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = cv2.resize(img, img_size)
img = tf.picture.convert_image_dtype(img, tf.float32)
return img
new_image = load_and_preprocess_image("/kaggle/enter/keras-depth-bee-image/bee.jpg")
This can be a easy perform that does an identical factor to what the “load_and_preprocess_data” perform did. Then we will infer the mannequin utilizing the straightforward line beneath.
predicted_depth = mannequin.predict(np.expand_dims(new_image, axis=0))
Now, we examined our picture with the educated mannequin. Let’s view the outcomes.
import matplotlib.pyplot as plt
plt.determine(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(new_image)
plt.title("Unique Picture")
plt.subplot(1, 2, 2)
plt.imshow(predicted_depth[0, :, :, 0], cmap=plt.cm.jet) # Take away batch dimension and channel
plt.title("Predicted Depth Map")
plt.present()
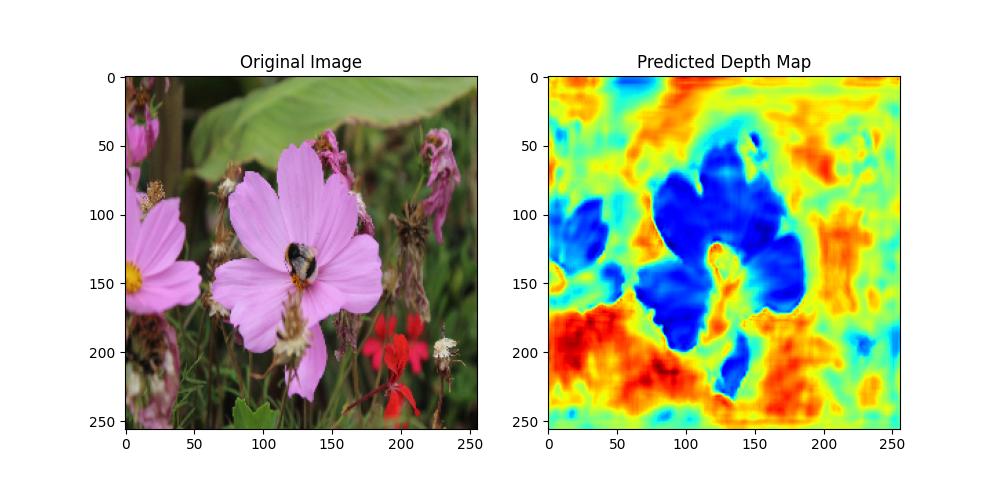
In abstract, constructing a monocular depth estimation mannequin from scratch could be an in depth job. Nevertheless, it’s an effective way to study an important job in laptop imaginative and prescient. The mannequin on this tutorial is only a easy demonstration, the outcomes will not be going to be nice due to the simplicity and the shortcuts we took. Moreover, we will strive a pre-trained mannequin with a number of traces of code and see the distinction.
Inferring a Pre-Educated Mannequin
On this part, we are going to use a easy inference on the Depth AnythingV2 mannequin, which achieves state-of-the-art outcomes on benchmark datasets like KITTI. Furthermore, to make use of this mannequin we solely want the few traces of code beneath.
from transformers import pipeline from PIL import Picture # load pipe pipe = pipeline(job="depth-estimation", mannequin="depth-anything/Depth-Something-V2-Small-hf") # load picture url="/kaggle/enter/keras-depth-bee-image/bee.jpg" picture = Picture.open(url) # inference depth = pipe(picture)["depth"]
If we save the “depth” variable we will see the results of the depth estimation which can also be fairly quick contemplating that we’re utilizing the small variation of the mannequin.

With this, we have now concluded the tutorial, nonetheless, that is solely a beginning step to constructing monocular depth estimation fashions. These fashions are a large analysis space in CV and are seeing fixed enhancements. It is because they’ve a variety of use circumstances, monocular depth estimation is vital for autonomous autos, robotics, well being, and even agriculture and historical past.
The Future Of Monocular Depth Estimation
As we have now seen, monocular depth estimation is a difficult however vital job in laptop imaginative and prescient. Purposes span from autonomous driving, robotics, and augmented actuality, to 3D modeling. The sector remains to be bettering, with researchers exploring new implementations and theories and pushing the boundaries. Deep studying with transformers is one promising space. This consists of exploring architectures like Imaginative and prescient Transformers (ViT) which have proven promising ends in many laptop imaginative and prescient duties together with monocular depth estimation.
Moreover, researchers strive integrating monocular depth estimation with different laptop imaginative and prescient duties. Object detection, semantic segmentation, and scene understanding mixed with depth estimation, can create extra complete AI programs that may work together with the world extra successfully.
The way forward for monocular depth estimation is shiny, with ongoing analysis promising to ship extra correct, environment friendly, and versatile options. As these developments proceed, we will anticipate to see much more progressive functions emerge, remodeling industries and enhancing our interplay with the world round us.
FAQs
Q1. What’s monocular depth estimation?
Monocular depth estimation is a pc imaginative and prescient approach for estimating depth data from a single picture.
Q2. Why is monocular depth estimation vital?
Monocular depth estimation is essential for varied functions the place understanding 3D scene geometry from a single picture is critical. This consists of:
- Autonomous driving.
- Robotics.
- Augmented actuality (AR).
Q3. What are the challenges in monocular depth estimation?
Estimating depth from a single picture is inherently ambiguous, as a number of 3D scenes can produce the identical 2D projection. This makes monocular depth estimation difficult. Key challenges embrace occlusions, textureless areas, and scale ambiguity.